I am currently an AI Robotics Research Scientist at Samsung
Electronics, working on AI-driven humanoid whole-body control and locomotion. My research
integrates human motion understanding, reinforcement learning, and control theory to enable
humanoid
robots to learn and adapt from human motion in real-world environments.
I earned my PhD in Electrical Engineering from KAIST,
where I was advised by Prof. Junmo Kim. My
doctoral research focused on capturing and reconstructing human-related subjects—such as body pose
and shape—under real-world conditions for practical applications in immersive environments.
During my PhD studies, I gained valuable experience through two internships at Meta Reality Labs—one in Pittsburgh, PA, USA
(2023), and another in Redmond, WA, USA (2024). I was also honored to be selected as a finalist
for
the Qualcomm
Innovation Fellowship in both 2022 and 2023.
If you're interested in collaborating, feel free to reach out!
My research builds upon my background in computer vision and human motion
understanding, extending it toward learning-based humanoid whole-body
control and locomotion. I am broadly interested in computer
vision, reinforcement learning, and robotics,
with a focus on:
Humanoid whole-body motion tracking and control
Perception-driven locomotion and manipulation
Imitation and policy learning from human motion
Sim2real adaptation for large-scale embodied systems
My long-term goal is to build generalizable humanoid agents capable of
learning directly from human motion and adapting seamlessly to real-world dynamics.
Work Experience
Samsung Electronics, Future Robot AI
Group | Aug 2025 - Present Research Scientist (Manager: Donghan Koo) Seoul, South Korea
Meta Reality Labs, XR Input
Perception | Jun 2024 - Dec 2024 Research Scientist Intern (Manager: Cem
Keskin) Redmond, WA, USA
Meta Reality Labs, Codec
Avatars
Lab | Dec 2023 - Feb 2024 Research Scientist Intern (Manager: Wei
Pu) Pittsburgh, PA, USA
Education
Korea Advanced Institute of Science and
Technology (KAIST) | Mar 2020 - Feb 2025 PhD in Electrical Engineering (Advisor: Prof. Junmo
Kim)
Dissertation: High-Fidelity Human Body Model Reconstruction in Unconstrained
Situations Daejeon, South Korea
Korea Advanced Institute of Science and
Technology (KAIST) | Mar 2018 - Feb 2020 MS in Electrical Engineering (Advisor: Prof. Junmo
Kim)
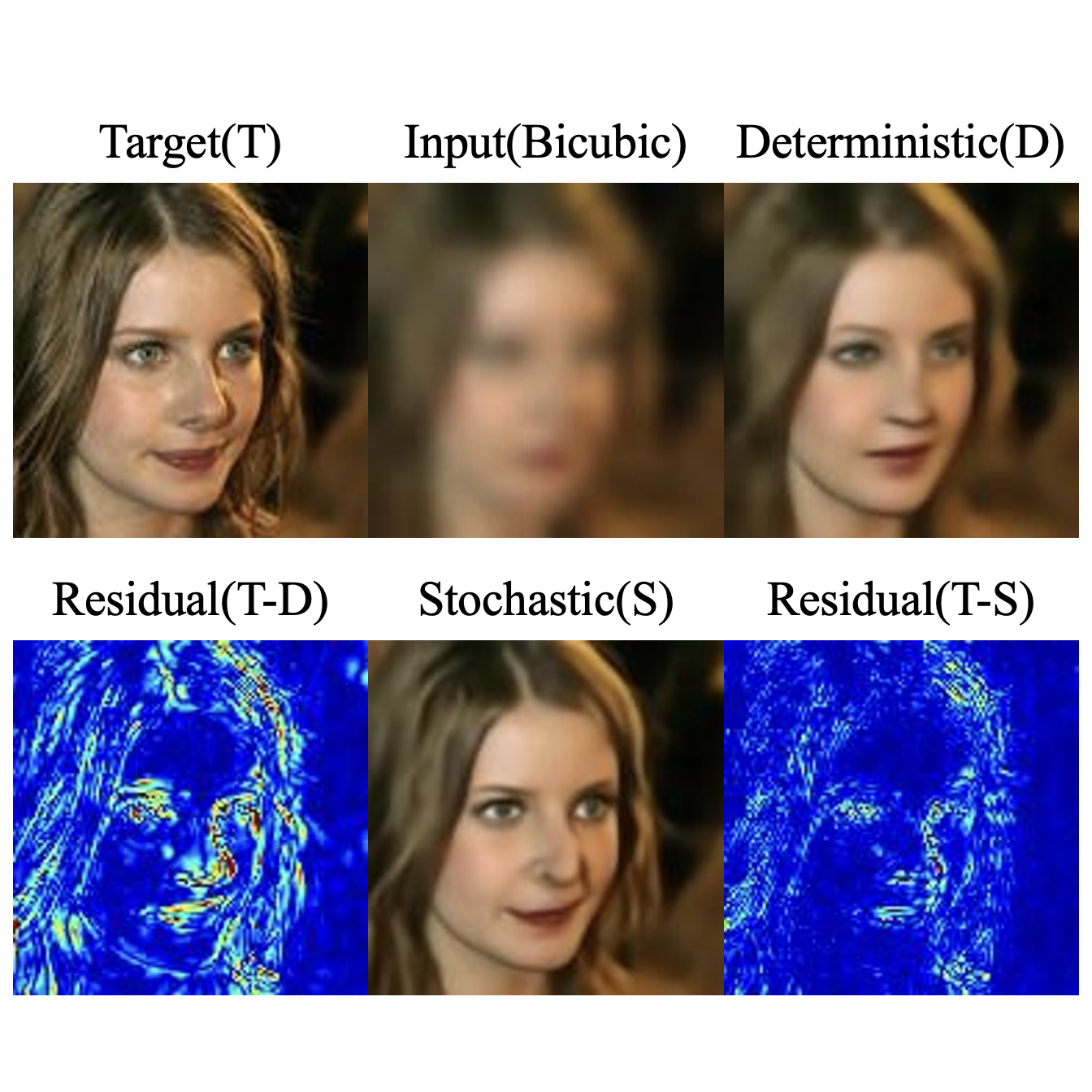
Thesis: Improving Performance of Face Super-Resolution with Stochastic Attributes
Modeling Daejeon, South Korea
My current research centers on learning-based humanoid whole-body control and locomotion, aiming
to
enable robots to learn agile and adaptive motion from data. Previously, I studied 3D human
reconstruction and motion understanding, which naturally led to my current interest in AI-driven
humanoid behavior learning. Below are my recent publications; some papers are highlighted.
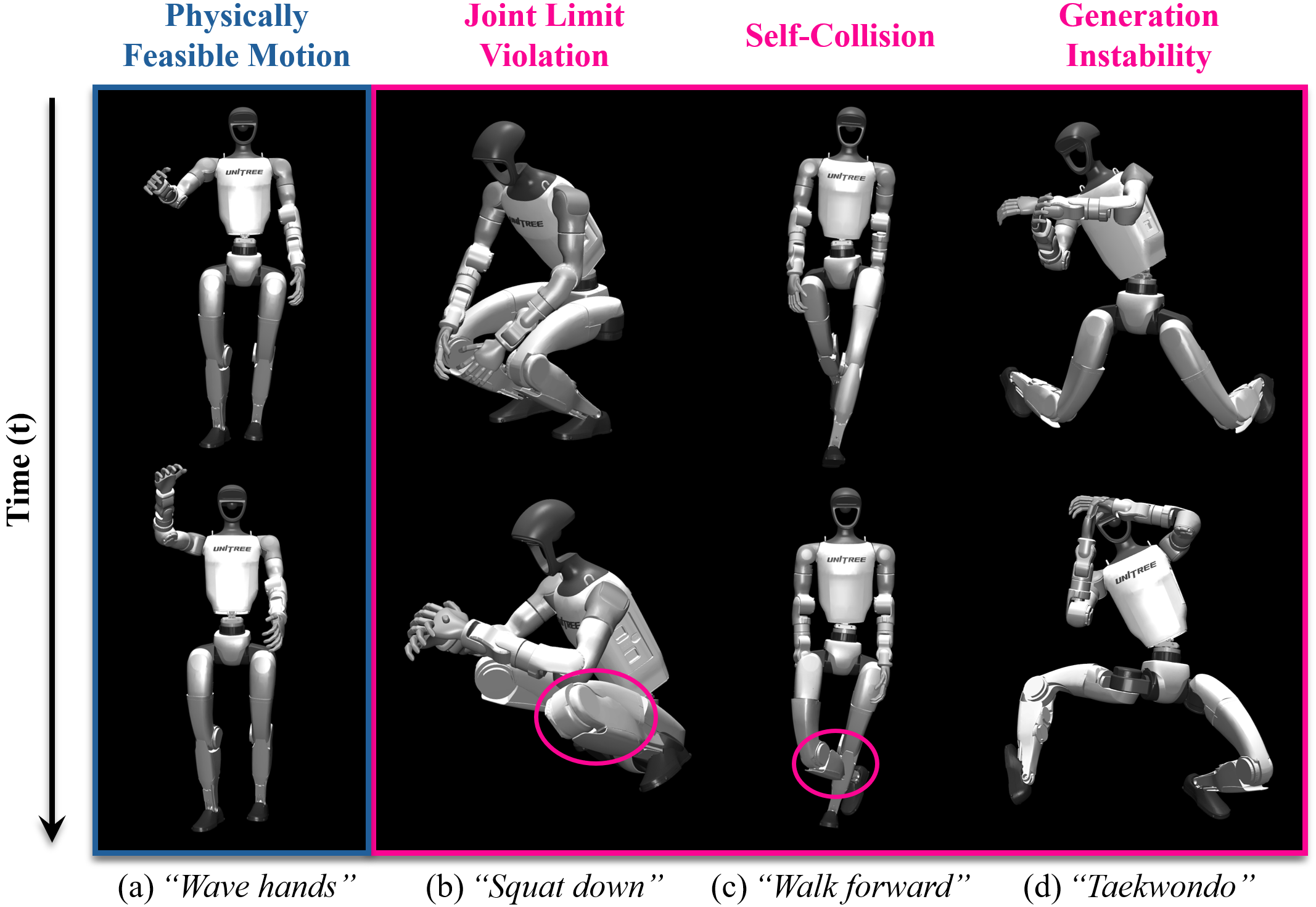
A real-time text-driven humanoid whole-body control framework combining physics-guided rectified
flow matching for executable motion generation with a 3-Stage Safety Gate for robust deployment
under out-of-distribution text inputs on the Unitree G1.
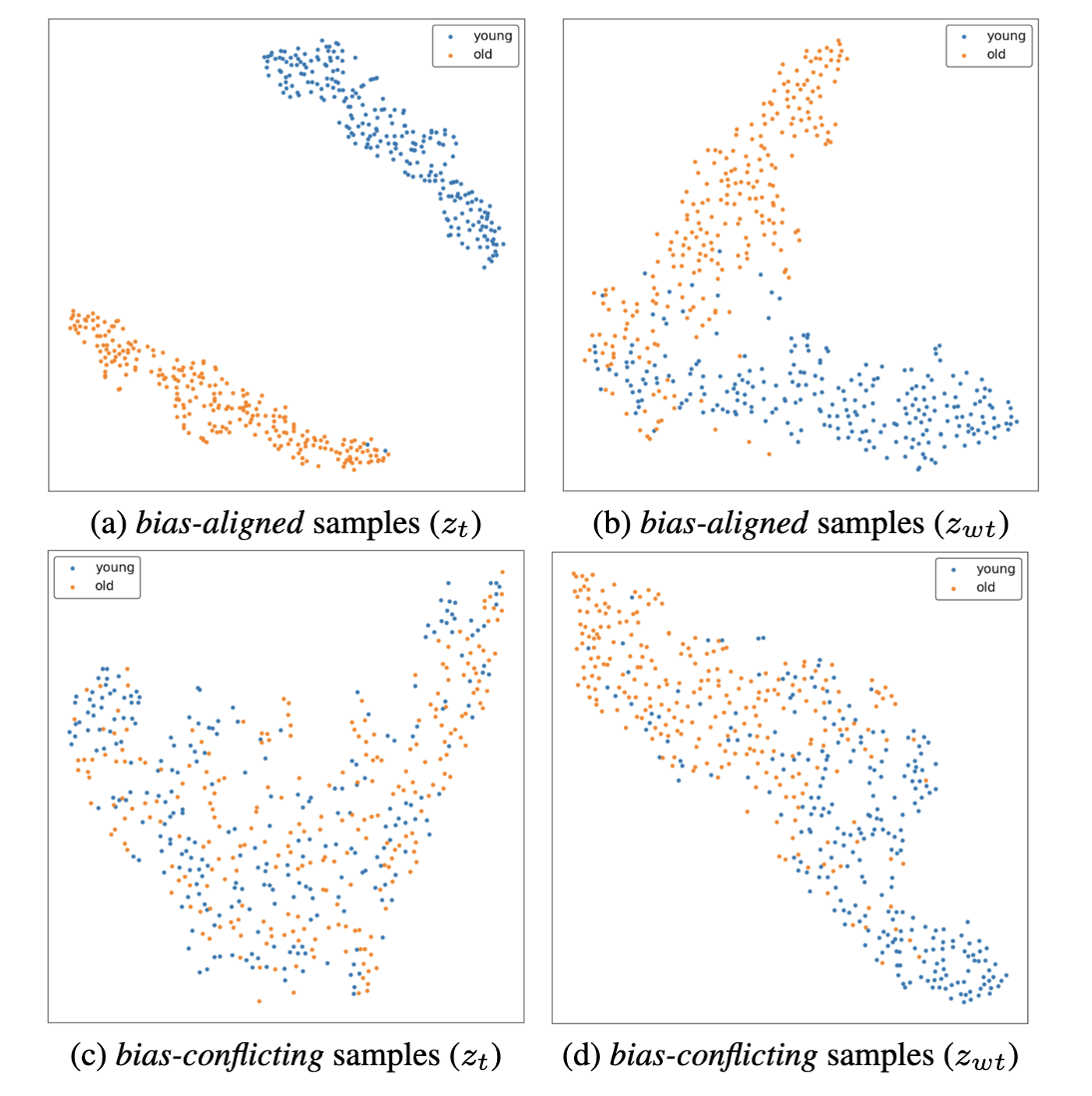
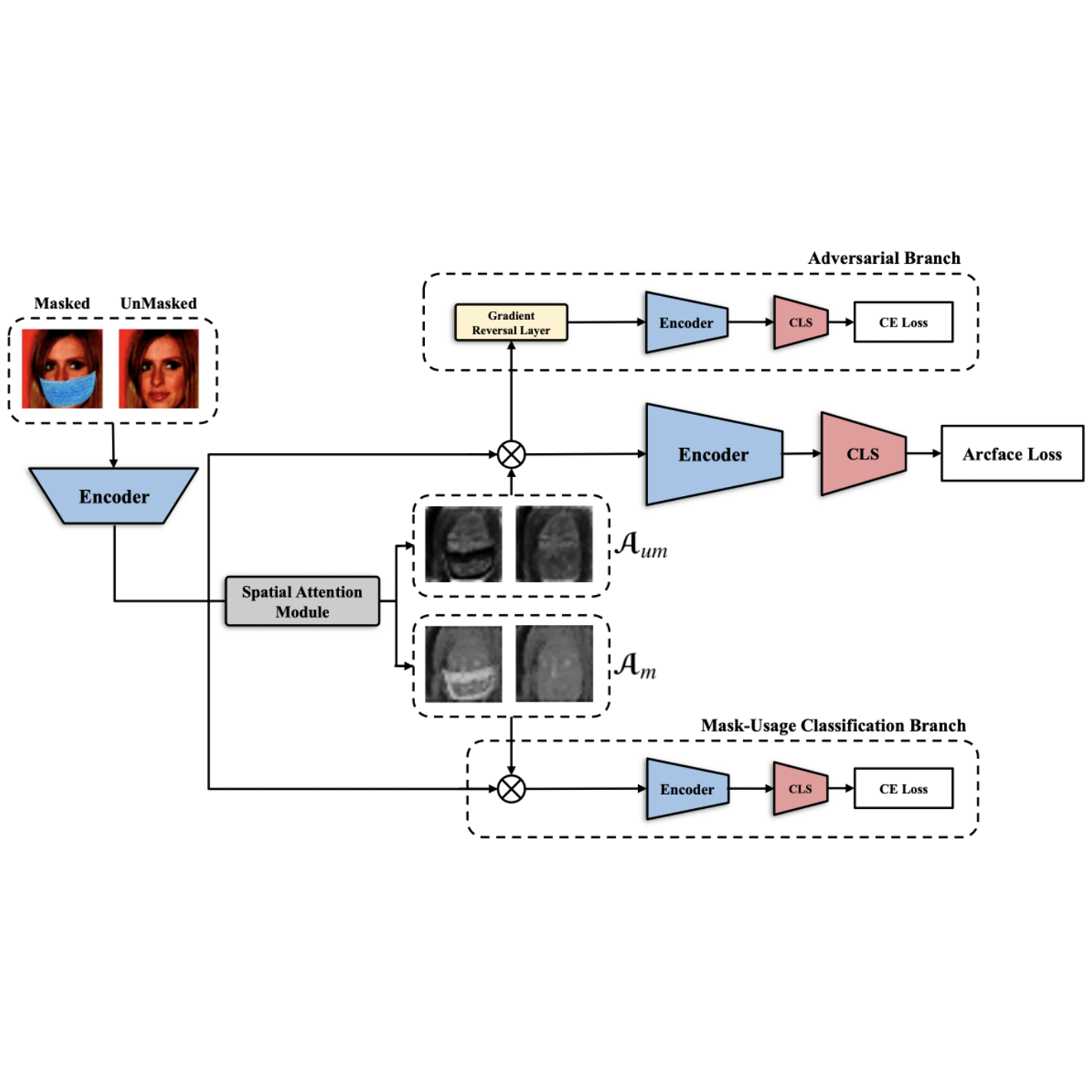
A lightweight and hyperparameter-free debiasing method that whitens feature representations to
remove bias, achieving fairness and utility trade-off without adversarial learning.
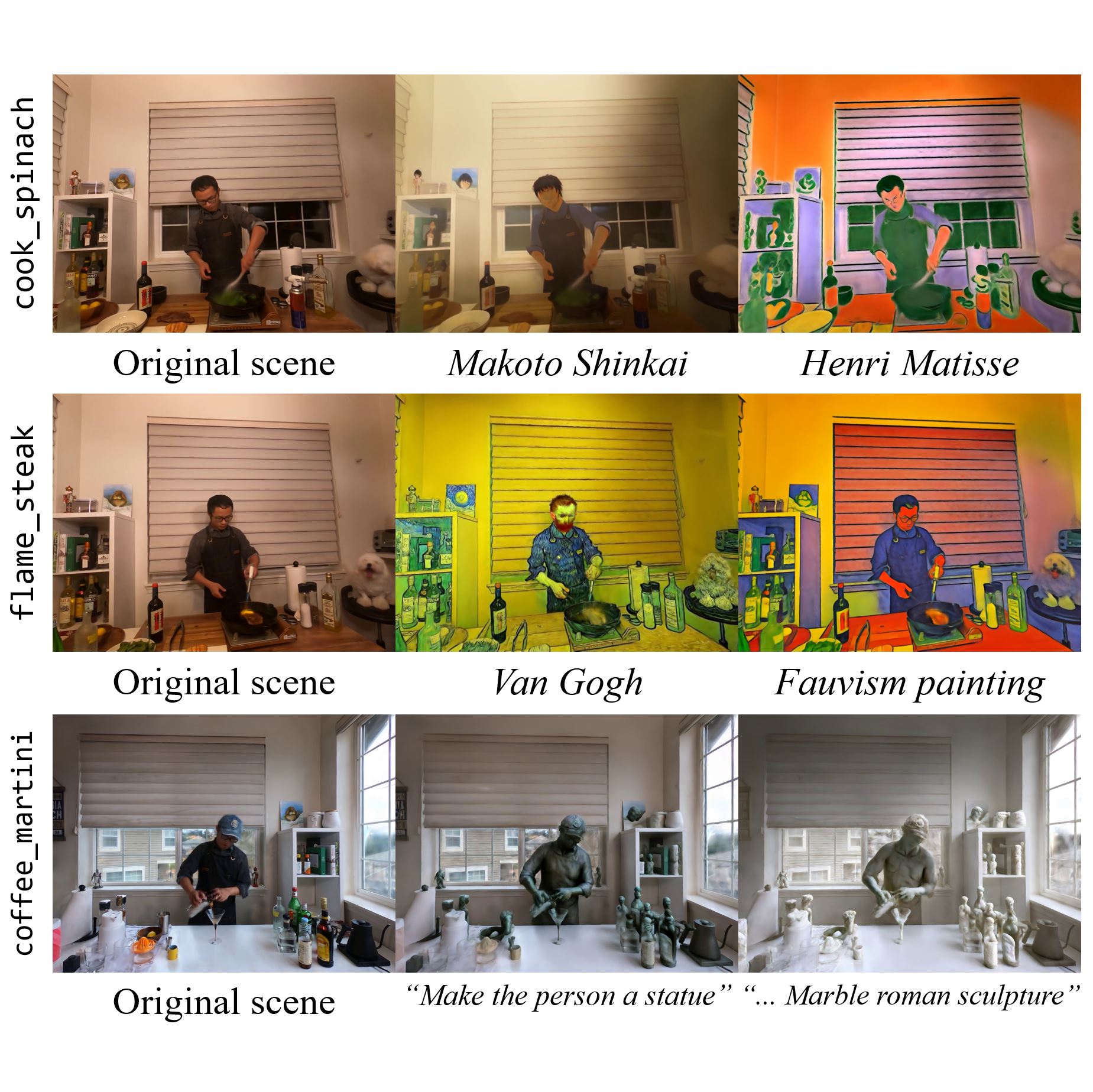
Efficient 4D dynamic scene editing method using 4D Gaussian Splatting, focusing on static 3D
Gaussians and score distillation refinement to achieve faster, high-quality edits.
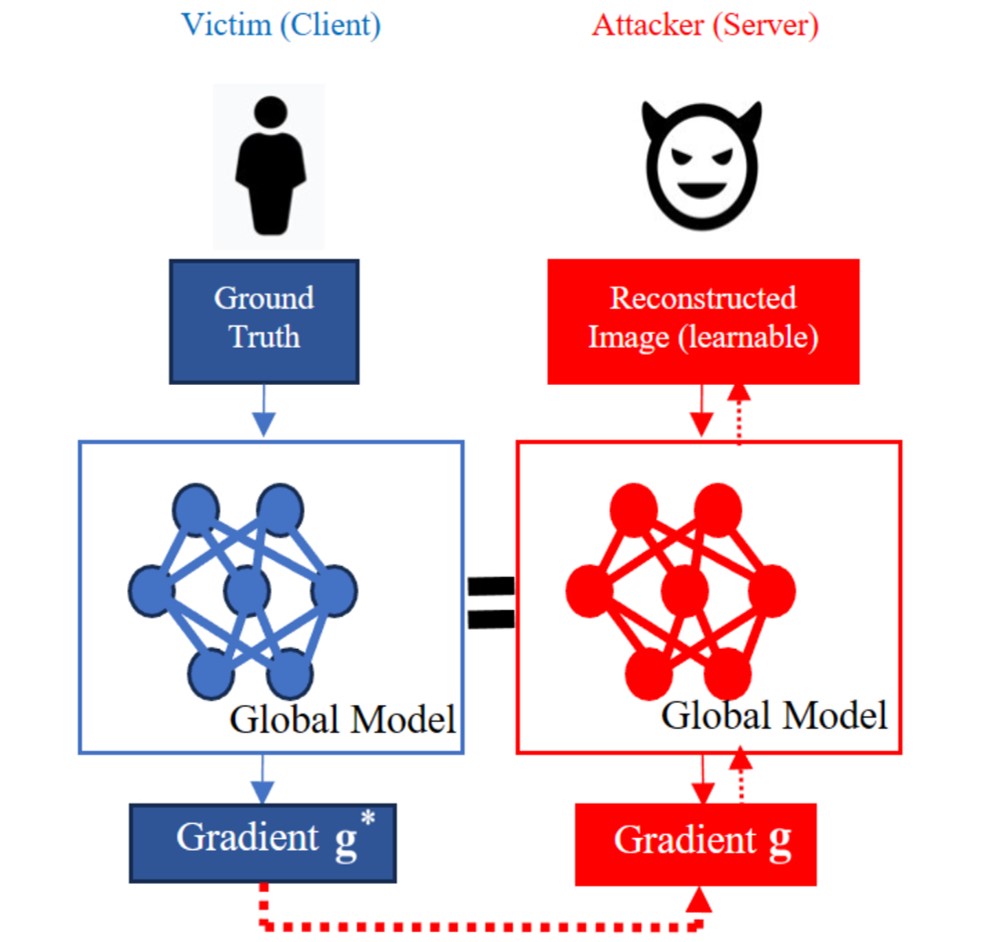
Proposes a novel loss-aware vulnerability proxy (LAVP) for gradient inversion attacks in federated
learning, using the maximum or minimum eigenvalue of the Hessian to capture sample vulnerabilities
beyond traditional gradient norm.
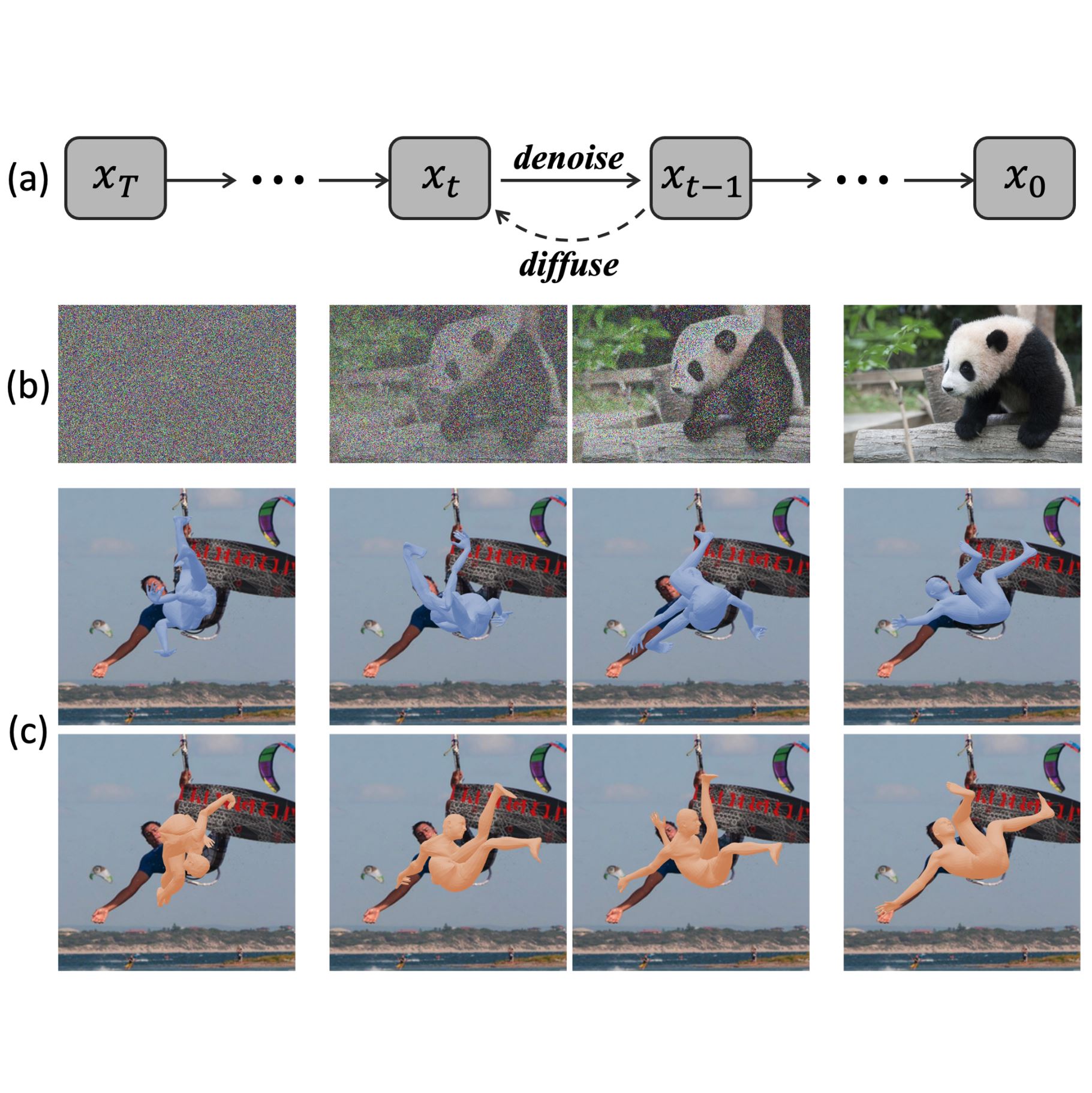
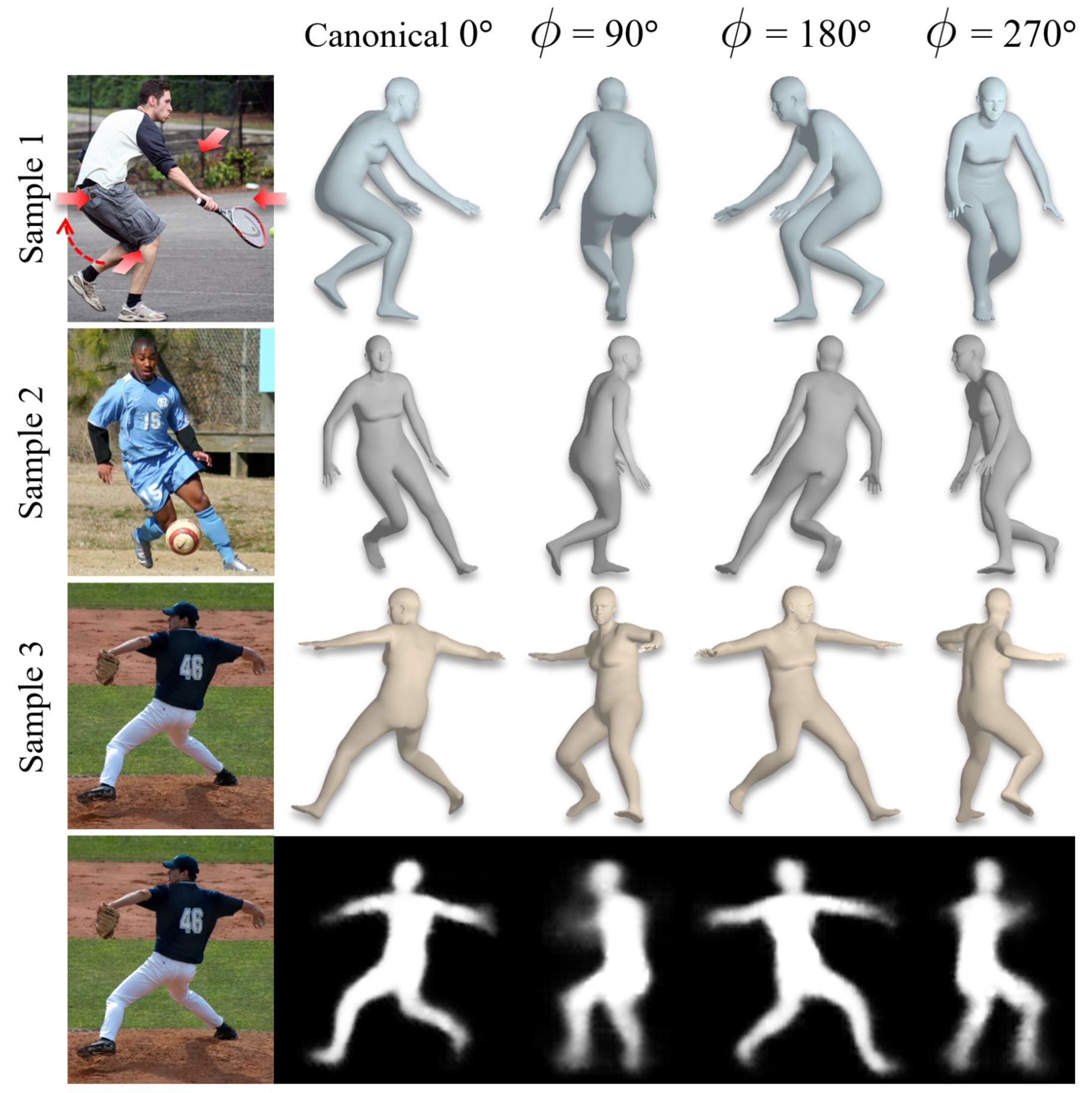
Proposes a novel generative framework for 3D human mesh recovery, leveraging denoising diffusion
to
model multiple plausible outcomes and address the inherent ambiguity in the task.
Leveraging neural feature fields to render multi-view feature maps and enforcing cross-view
consistency enables accurate 3D human mesh recovery from a single image.
Replacing naive GRU-based modeling with a Vision Transformer and a learnable Channel Rearranging
Matrix reduces motion fragmentation, boosting human mesh recovery accuracy, robustness, and
efficiency.
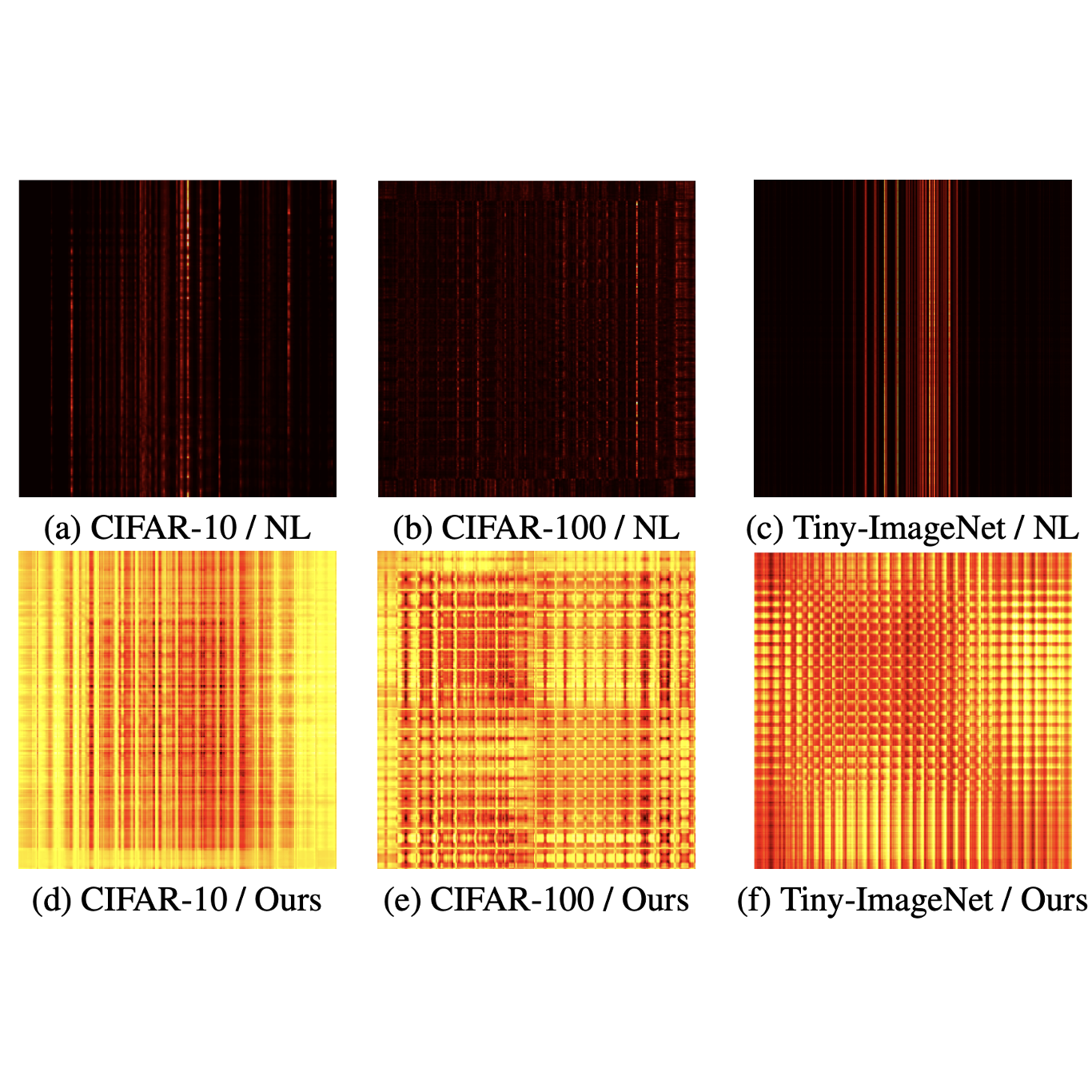
Replacing softmax in non-local blocks with a simple scaling factor mitigates its over-reliance on
vector magnitude, thereby improving performance, robustness, and efficiency.
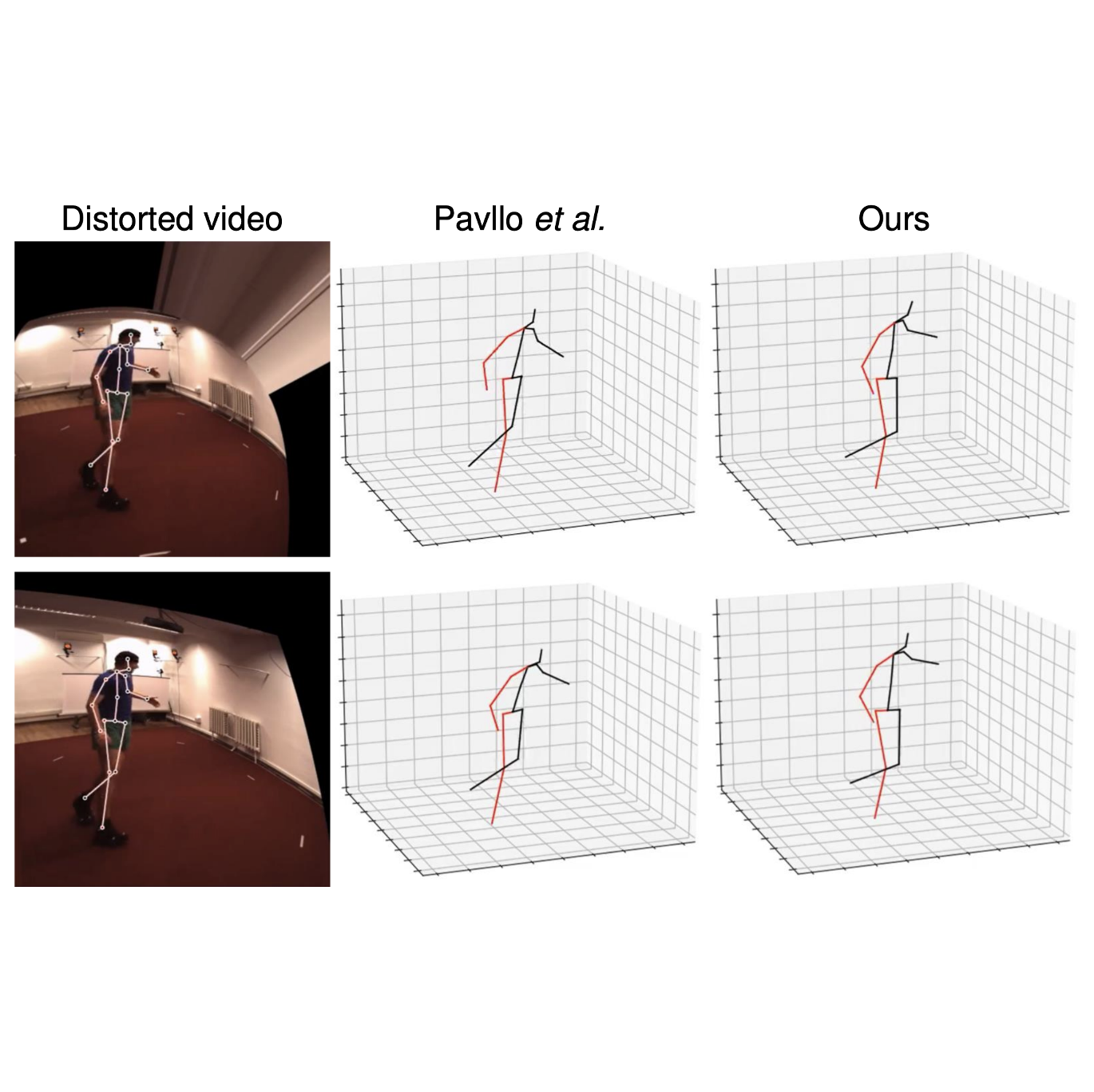
3D human pose estimation model that leverages MAML and synthetic distorted data to rapidly adapt
to
various camera distortions without requiring calibration.
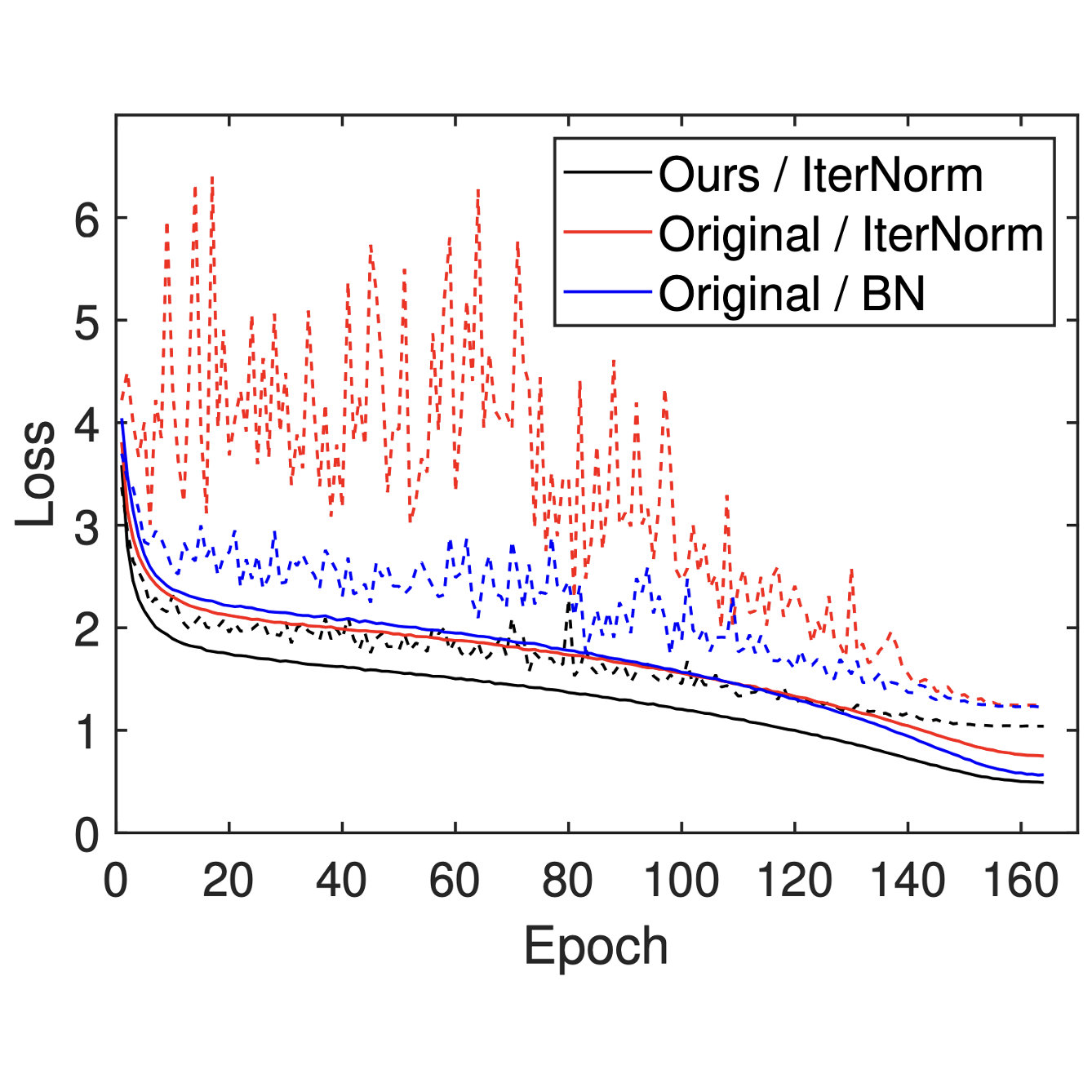
Introduces a novel Convolutional Unit that aligns whitening theory with convolutional
architectures,
significantly boosting the stability and performance of Batch Whitening.
Stochastic modeling-based face super-resolution method that separates deterministic and stochastic
attributes to reduce uncertainty and improve reconstruction quality.